Admittance controller for post-collision recovery of a UAV
Implemented a admittance controller for post-collision recovery of a collision-resilient quadrotor
ROS Gazebo Path Planning Python

Implemented a admittance controller for post-collision recovery of a collision-resilient quadrotor
ROS Gazebo Path Planning Python
Course project CSE591: Perception in Robotics
OpenCV Kalman Filter Object detection Tracking algorithm
MAE598: Design Optimization by Prof. Yi (Max) Ren course project.
Python PyTorch cvxpy convex optimization

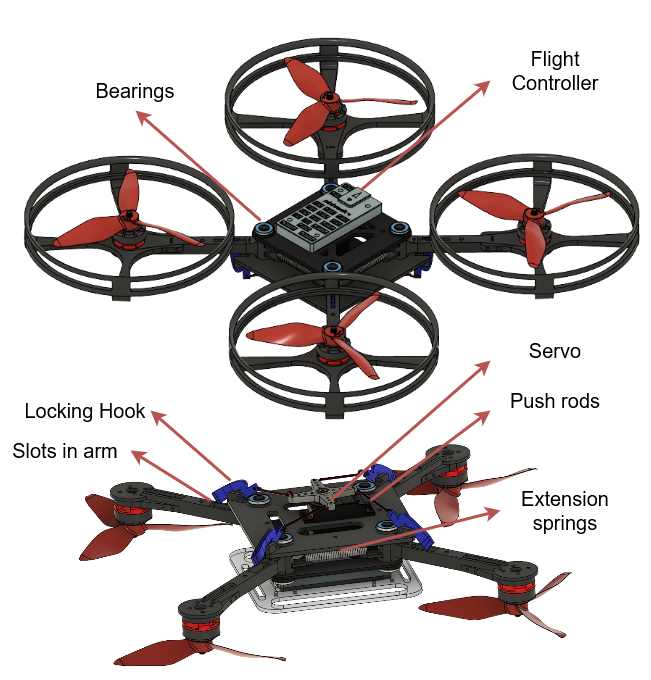
Contributed to an ongoing research project at RISE LAB advised by Prof. Wenlong Zhang
Static stress analysis SolidWorks PX4-ROS2 Offboard Mission Planning

Course Project for MAE506: Advance Modeling and Control of Robots (Prof. Zhe Xu)
state-feedback controller discrete-time modeling observer design

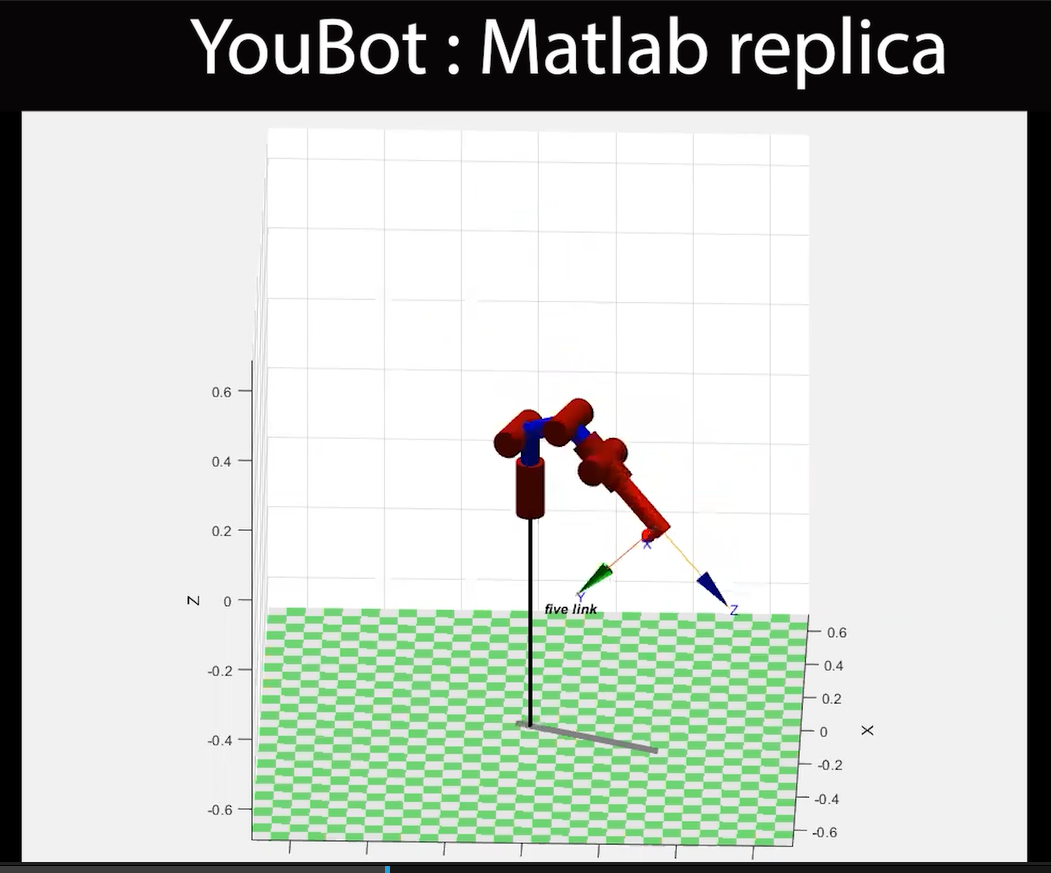
Course Project for MAE506: Modeling and Control of Robots (Prof. Hyunglae Lee)
Matlab WeBots Trajectory Planning Inverse-kinematics
Course Project for EGR546: Robotic Systems II (Prof. Sangram Redkar)
Matlab Flight controller Simulink
Built an inexpensive, 3d printed quadcopter from scratch. The quadcopter was deployed for photogrammetry of mines for volumetric data analysis.
SolidWorks GD&T Rapid Prototyping Sensor integration

Research Project at Robotics Innovations Lab, Indian Institute of Science, Banglore, India
SolidWorks Simulink UAV Toolbox Topology optimization 3d printing Laser cutting
